Microactuator solution

If the wheel was the best invention to generate motion nature might use it -but nature selected muscle
In engineering the muscle is MSM
Kari Ullakko
Magnetic Shape Memory (MSM) Actuators: Next-Generation Motion Solutions
MSM actuators are poised to transform fields such as robotics, aerospace, miniaturized automation, lab-on-chip systems, haptics, and precision instrumentation, where speed, efficiency, and miniaturization are crucial. Patent pending solution.
Linear
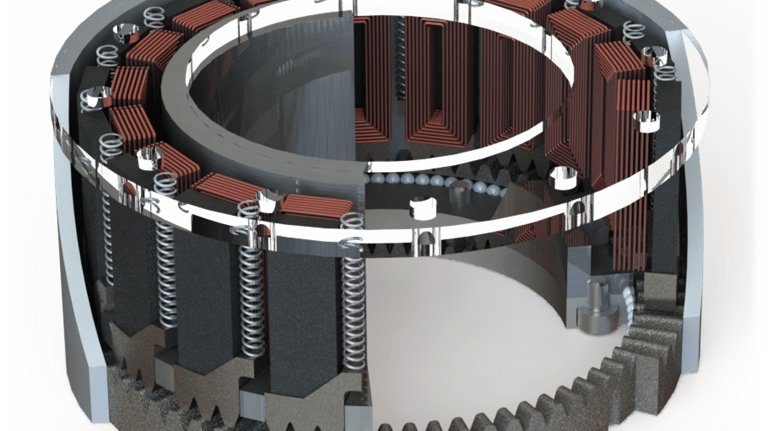
Rotational
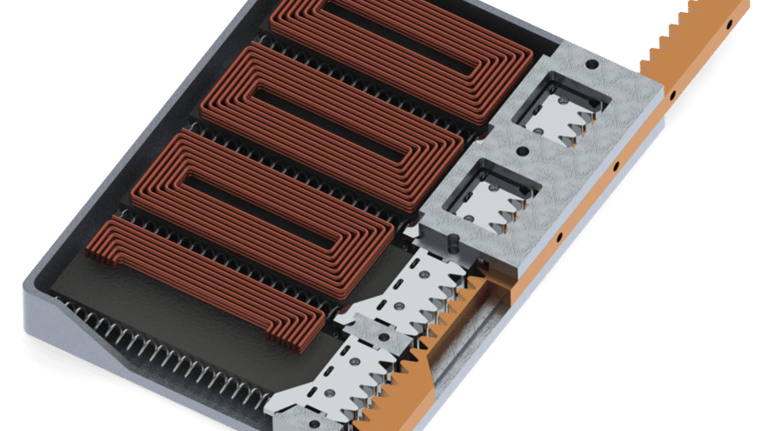
Linear MSM actuators convert magnetic field-induced strain into direct push-pull motion with remarkable speed and accuracy. These actuators use MSM alloys such as Ni-Mn-Ga to deliver high-frequency operation, low inertia, and excellent energy efficiency—ideal for compact robotics, microvalves, haptics, and medical devices. Unlike conventional actuators, MSM devices offer multistability, self-sensing capabilities, and energy-free holding positions. By integrating strain wave gearing, MSM linear actuators now achieve greater force output and virtually unlimited travel, making them a next-gen solution for miniaturized automation and intelligent control systems
Rotational MSM actuators bring a new class of ultra-compact torque solutions using smart magnetic alloys. By integrating MSM materials with strain wave gearing principles, these actuators transform high-frequency linear micro-motions into continuous rotary motion—enabling smooth, precise, and powerful revolutions in limited spaces. Unlike piezoelectric or SMA-based drives, MSM rotational actuators deliver faster dynamics, higher torque-to-weight ratios, and design freedom in cylindrical or flat formats. Perfect for next-gen robotic joints, lab-on-chip systems, aerospace controls, and compact servo units, these actuators unlock untapped potential in smart rotary mechanics
I. Kulagin, M. Li, V. Laitinen and H. Handroos, "Review of MSM Actuators: Applications, Challenges, and Potential," in IEEE Access, vol. 10, pp. 83841-83850, 2022, doi: 10.1109/ACCESS.2022.3197278.
Kulagin, I., Li, M., Laitinen, V., & Handroos, H. (2024). Modeling of magnetic shape memory based linear and rotary actuators that utilize strain wave gearing. Engineering Science and Technology, an International Journal, 54, 101717. https://doi.org/10.1016/j.jestch.2024.101717
Read about research:
Project Goals
Develop and Demonstrate the Technology:
Build and test proof-of-concept prototypes of MSM-based actuators, showcasing viability, and confirm their superior power density and compact design compared to conventional solutions.Market and Use Case Validation:
Identify promising application areas by analyzing market needs, trends, and key customer requirements.Prepare for Commercialization:
Establish partnerships and define the most viable business models to enable successful market entry and long-term growth.
The Minimize project, led by LUT University and LAB University of Applied Sciences, aims to pioneer new business from research by developing compact, high-power-density actuators based on Magnetic Shape Memory (MSM) alloys. Our mission is to create and validate a novel actuator technology that delivers exceptional performance for next-generation robotics, prosthetics, and automation systems.
The project sets the stage for a new generation of efficient, lightweight, and versatile actuator technologies to accelerate innovation across multiple industries.
Main Aims for Proof of Concept
ADVANTAGES
Magnetic Shape Memory (MSM) actuators offer a unique combination of speed, precision, and compact design. They provide high power-to-weight ratios, ultra-fast response, and energy-efficient operation, allowing both linear and rotational motion in a single technology. With their ability to hold positions without continuous power, MSM actuators enable innovative solutions for robotics, automation, medical devices, and aerospace—delivering reliable performance where traditional actuators fall short.
Compact and Lightweight
MSM actuators deliver high force and torque in small form factors, making them ideal for applications with strict space and weight constraints.
Capable of high-frequency & speed operation and fine control. Potential for high speed (especially in micro-scale), thanks to low inertia and short pulse-driven movement.
MSM actuators can hold positions without consuming energy, thanks to their intrinsic material properties, reducing power requirements for holding and clamping tasks.
Fast and Precise
Energy Efficient & Multistable
Discrete step positioning (“digital” actuation): no need for continuous feedback sensors if positioning aligns with the tooth pitch.
Versatile Motion
MINIMIZE PROJECT
This project is jointly implemented by LUT University and LAB University of Applied Sciences. It combines multidisciplinary expertise in advanced materials, robotics technologies, and innovation commercialization. The work is carried out as part of the Research to Business (R2B) funding instrument, supported by Business Finland, with the aim of preparing high-potential research innovations for market entry and entrepreneurial exploitation.
© 2025. All rights reserved.

CONTACT
By submitting this form, you consent to the processing of your personal data in accordance with GDPR. For full details, please see the privacy notice on our university website.